
MedicalPlanet
Контактные данные:
admin@medicalplanet.su
2009-2023
Простая роботическая гистерэктомия Da Vinci: техника операции, этапы
Использование лапароскопической техники в современной гинекологии принесло большую пользу больным, так как позволило уменьшить кровопотерю, сократить время пребывания в стационаре и ускорить заживление в сравнении с лапаротомическими техниками гинекологических вмешательств. Лапароскопические техники имели и некоторые присущие им недостатки, которые привели к медленному их внедрению в практику большинства гинекологов при сложных и не очень операциях.
Ограничения, связанные с двумерностью операционного поля, непривычностью движений, жестокостью инструментов, стали главной причиной, тормозящей широкое внедрение в практику лапароскопических операций.
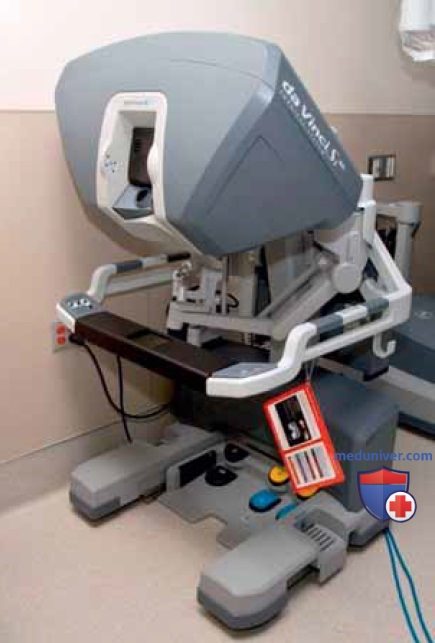
Роботические методы были разработаны для облегчения выполнения лапароскопических операций, так как позволяли устранить недостатки лапароскопии, в частности обеспечив трехмерное восприятие операционного поля, гибкость инструментов и привычность движений. Другим дополнительным преимуществом стало создание консоли для хирурга, что позволило выполнять операцию сидя (рис. 1).
Уменьшается амплитуда движений, снижается тремор рук, что повышает точность хирургических манипуляций. Роботический подход является разновидностью и дальнейшим развитием лапароскопической техники, и поэтому стали использовать такие термины, как «лапароскопическая операция с применением вспомогательной робототехники», которые употребляют вместо термина «роботическая хирургия».
Я предпочитаю употреблять именно этот термин для обозначения как чисто роботических операций, когда все манипуляции выполняет робот, так и гибридных, где часть работы берет на себя робот, а часть — хирург, владеющий методами лапароскопической хирургии.
а) Сравнение лапароскопических и роботических методов. В многочисленных исследованиях было показано, что при использовании роботических методов повысилась точность выполнения хирургических манипуляций, увеличилась быстрота наложения и завязывания узлов, уменьшилось число ошибок, обусловленных недостаточной квалификацией, и сокращением времени обучения хирургов, при проведении роботических операций в сравнении с традиционными лапароскопическими операциями.
Но если все же свести все к сути дела, то можно еще раз повторить, что роботические операции — это усовершенствованные лапароскопические операции.
б) Хирургическая система Da Vinci. Управление по контролю пищевых продуктов и лекарств США 11 июля 2000 г. одобрило применение хирургической системы Da Vinci (Intuitive Surgery, Inc., Sunnyvale, Calif.) в хирургии полостей живота и таза, а в 2005 г. особо одобрило применение этого роботического устройства при роботической гистерэктомии. Исходная стандартная система была позднее заменена системой S, а затем и системой Si, которая применяется до сих пор (рис. 2).

Усовершенствования коснулись длины инструментов (она стала больше), веса манипуляторов (они стали легче), а также уменьшения амплитуды боковых движений при хирургических манипуляциях; улучшились разрешение оптических приборов, визуализация анатомических объектов и слоев; цифровое приближение изображения и автоматическая передвижная роботическая консоль. Появились и новые инструменты: шарнирные кровоостанавливающие зажимы, системы орошения с отсасыванием и степлер для кишечной хирургии.
Была изобретена обучающая консоль для улучшения качества подготовки специалистов. Обучающая консоль идентична хирургической консоли и имеет две системы управления, что позволяет хирургу и практиканту меняться ролями в процессе операции. Кроме того, хирург может перемещать по операционному полю коническую стрелку, которой может указать практиканту, где следует выполнить отсепаровку, разрез, где надо проявить осторожность во избежание травмы прилежащих структур. Все это сильно облегчает процесс обучения.
в) Приложения в гинекологии. Система Da Vinci была сконструирована для выполнения сложных манипуляций в ограниченном пространстве. Поэтому манипуляции с крупными объектами в обширном операционном поле — это не самое удачное использование данной системы.
С 16 марта 2004 г. я выполнил с помощью системы Da Vinci более двух тысяч операций по поводу доброкачественных и злокачественных новообразований в клинике Мэйо-Аризона. По моему мнению, при некоторых заболеваниях, доброкачественных и злокачественных, использование системы Da Vinci имеет свои преимущества. Среди таких заболеваний — тяжелые формы эндометриоза, операция сакрокольпопексии, иссечение влагалищных свищей, метастазов, расположенных на диафрагме или поверхности печени, радикальная гистерэктомия, иссечение тазовых и аортальных лимфатических узлов, сегментарная резекция мочевого пузыря и мочеточников, резекция прямой и сигмовидной кишки и другие операции в ограниченном малом пространстве с трудным доступом, например при опухолях в предкрестцовой области или рецидивирующих поражениях стенок таза.
У пациенток, страдающих ожирением, из-за отсутствия тактильной обратной связи при манипуляциях управляемыми роботом инструментами работающий у консоли хирург не чувствует повышенного сопротивления тканей, а это означает, что усилия хирурга и точность его движений остаются неизменными. Я не обнаружил удлинения времени операции при выполнении роботической гистерэктомии на фоне увеличения индекса массы тела больных.
В гинекологической онкологии радикальная роботическая гистерэктомия имеет меньшую длительность, чем лапароскопическая радикальная гистерэктомия, при одинаковых исходах. Частота конверсии доступа составляла при роботической методике 3%, при лапароскопической — 9%, хотя другие исходы оказываются схожими. При раннем раке яичников роботические и лапароскопические операции дают одинаковые исходы. Тем не менее при запущенном раке яичников роботический метод предпочтительнее, так как позволяет легче резецировать метастазы в печени и диафрагме.
г) Простая роботическая гистерэктомия Da Vinci. Внедрение в клиническую практику роботических операций привело к быстрому уменьшению числа открытых гистерэктомий, то есть к результату, которого не удалось добиться после внедрения лапароскопических операций, что говорит о том, что хирурги предпочитают роботические методы чисто лапароскопическим. Я не рекомендую применять робототехнику для удаления большой матки при ее доброкачественных поражениях, когда для удаления ее через влагалище орган надо разделить больше, чем на две части. В таких случаях предпочтительнее влагалищный доступ.
Я не рекомендую также проведение надшеечных манипуляций, так как здесь тактический выигрыш может обернуться тяжелым стратегическим риском. Я не рекомендую применение морцелляторов для удаления матки или фиброматозных опухолей из-за возможности долгосрочных осложнений и риска интраоперационных травм прилежащих органов. Если применение морцеллятора неизбежно для удаления матки, то я предпочитаю влагалищный доступ.
д) Размещение роботической консоли. Консоль стоит подальше от операционного стола до тех пор, пока ее не подготовят к работе (рис. 3).

Консоль можно расположить в центре или сбоку от стола — справа или слева. Если консоль размещают между ног пациентки, находящейся в литотомическом положении, то это препятствует доступу к влагалищу, например, при удалении фрагментов тканей или матки. Если консоль расположена справа или слева от больной на уровне ее коленей (рис. 4, 5), то этот недостаток устраняется, и операцию можно выполнять с той же легкостью, как и при центральном положении консоли.


Самое распространенное положение — это сбоку от больной. Я разработал модель платформы для бокового расположения (рис. 6), которая облегчает одинаковое расположение консоли для всех операций на области таза.

е) Положение трокаров. Для введения роботического лапароскопа всем нашим больным мы осуществляем доступ через пупок, чтобы избежать ранения крупных кровеносных сосудов. Осматривается верхний этаж брюшной полости, а потом головной конец опускают до тех пор, пока тонкий кишечник и сигмовидная кишка не оказываются вне полости таза.
Во всех операциях мы используем по меньшей мере четыре трокара, три для манипуляторов робота (включая оптический трокар) и один для ассистента. Четвертый трокар для манипулятора требуется, если хирургу нужна дополнительная помощь (рис. 7).

Мое обычное размещение трокаров при тазовых операциях выглядит следующим образом: два трокара для робота располагают на уровне пупка, в 12 см справа и слева от него соответственно. 10 мм трокар ассистента — на середине расстояния между пупком и левым трокаром робота, и на 3 см выше этой воображаемой линии. Четвертый манипулятор робота, если он используется, располагают симметрично по отношению к трокару ассистента на правой стороне. Манипуляторы присоединяют к трокарам робота. После сборки этой конструкции операционный стол нельзя сдвигать с места и надо внимательно следить за тем, чтобы больная не перемещалась по столу (рис. 8).

ж) Инструментарий для роботических операций. Инструменты для роботической операции (рис. 9) проводят через трокары, после того как к ним присоединяют манипуляторы робота.

Среди множества инструментов компании EndoWrist, которые используют при работе с системой Da Vinci, чаще всего применяют двухполюсные ПК-щипцы для рассечения тканей (рис. 10), захватывающие щипцы ProGrasp (рис. 11), однополюсную лопатку (рис. 12), однополюсные ножницы и иглодержатель (снабженный ножницами для отрезания швов) (рис. 13).




Однополюсным шпателем или ножницами (в зависимости от предпочтений хирурга) работают правой рукой, а плазмокинетическими рассекающими щипцами — левой. Шпатель или ножницы заменяют многоигольчатой обоймой, когда возникает необходимость наложить швы. Захватывающие щипцы используются в качестве ретрактора, если введен четвертый трокар. Роботический лапароскоп имеет диаметр 12 мм (рис. 14) и двойную оптическую систему.

Его вводят через оптический трокар, введенный в области пупка.
з) Роль ассистента и операционной сестры. Ассистент способствует улучшению качества операции, используя кровоостанавливающие инструменты, осуществляя отсасывание жидкости и орошение операционного поля, накладывая швы и устраняя неполадки в работе роботического оборудования.
По ходу отсепаровки мочевого пузыря и кольпотомии операционная сестра помогает посредством влагалищного зонда (рис. 15) или шеечного колпачка (он похож на маточный манипулятор, но без маточного зонда) облегчить диссекцию мочевого пузыря или определить местоположение соединения влагалища и шейки матки.

Пневмоперитонеум обеспечивают в ходе кольпотомии, просто сближая большие половые губы поверх введенной во влагалище салфетки. Матку удерживают двузубыми пулевыми щипцами, удерживая большие половые губы сведенными на срединной линии. После извлечения удаленных тканей во влагалище вводят наполненный водой (60 мл) баллон для поддержания пневмоперитонеума во время ушивания кольпотомии.
и) Техника. Если нет особых показаний, то техника выполнения операции должна быть одинакова во всех случаях.
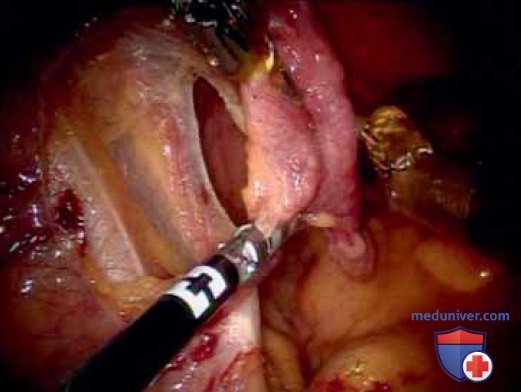
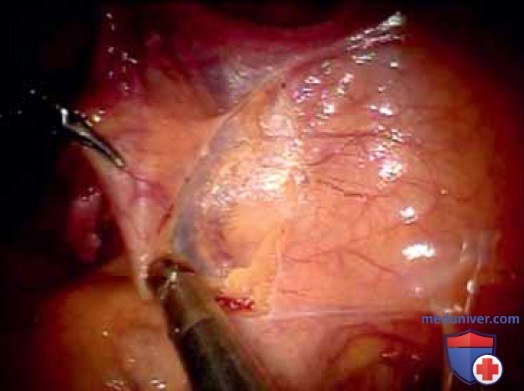
1. Выделение и разделение воронкотазовой связки. Матку отводят вправо и латерально, параллельно воронкотазовой связке рассекают брюшину (рис. 16).
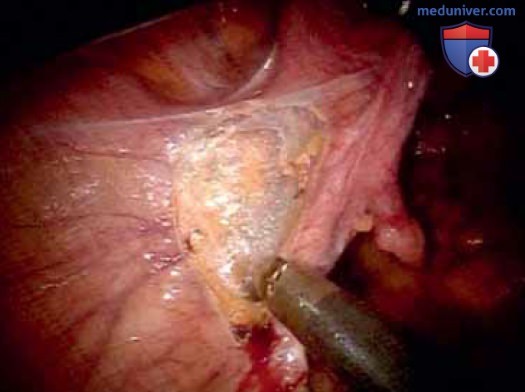
Латерально от воронкотазовой связки обнажают забрюшинное пространство и выделяют мочеточник (рис. 17).
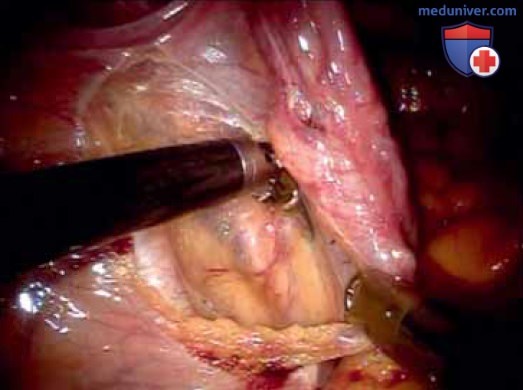
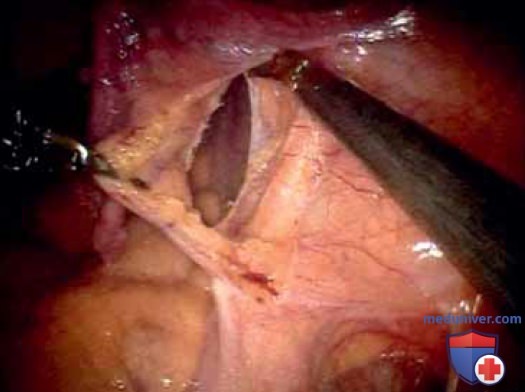
Между мочеточником и воронкотазовой связкой в брюшине проделывают отверстие (рис. 18).
Разделяя связку коагулирующим сосуды инструментом, следят за тем, чтобы не повредить мочеточник (рис. 19).
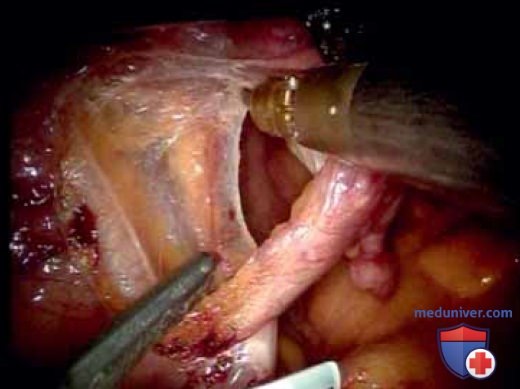
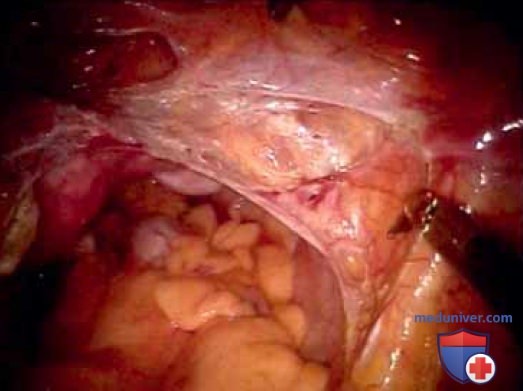
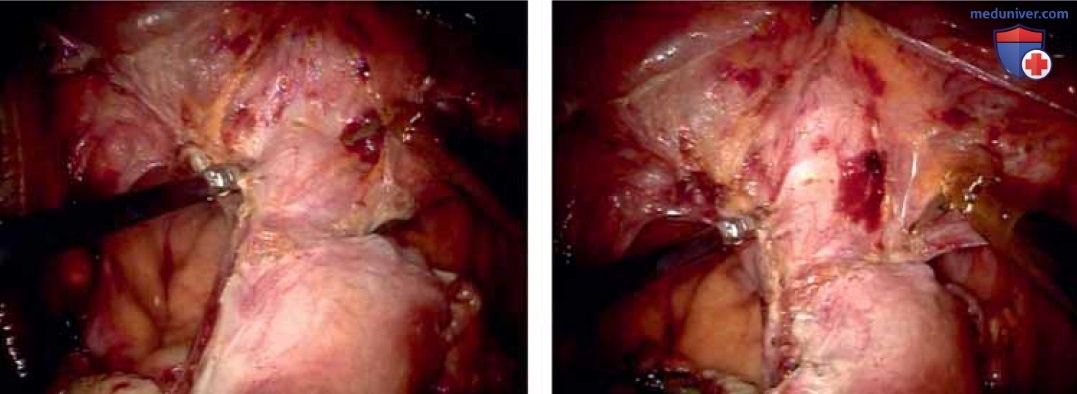
2. Разделение тазовой брюшины и круглой связки. Брюшину над подвздошными сосудами рассекают в направлении к латеральному (но не медиальному) краю круглой связки, которую пересекают. Брюшину под наружными подвздошными сосудами рассекают в направлении места прикрепления крестцово-маточной связки к шейке матки.
После пересечения круглой связки у ее латерального края (рис. 20) передний листок широкой связки разделяют в направлении к пузырно-маточной складке, открывая широкую связку (рис. 21) и обнажают маточные сосуды, проходящие вдоль стенки матки.
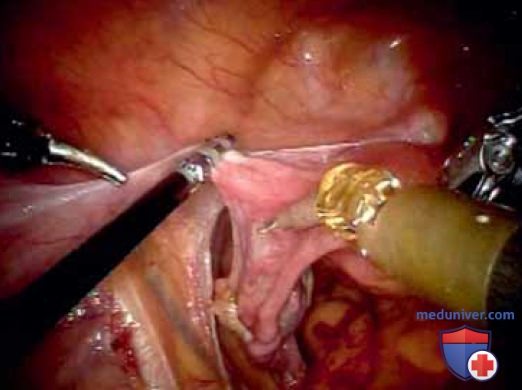
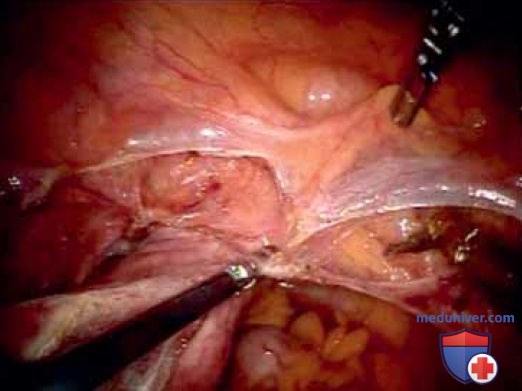
После вскрытия широкой связки и обнаружения маточных сосудов прослеживают мочеточник от уровня входа в таз до перекрещивания с маточной артерией и отмечают его расстояние от шейки матки и маточных сосудов (рис. 22).
В 90% мочеточник находится на достаточном удалении от шейки, что позволяет безопасно выделить кардинальную связку. В оставшихся 10% мочеточник находится от шейки ближе, чем 0,5 см, и повышается риск его повреждения.
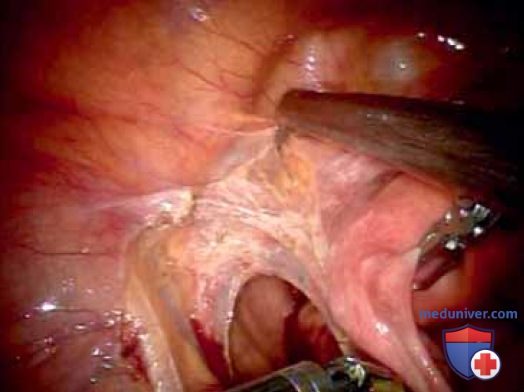
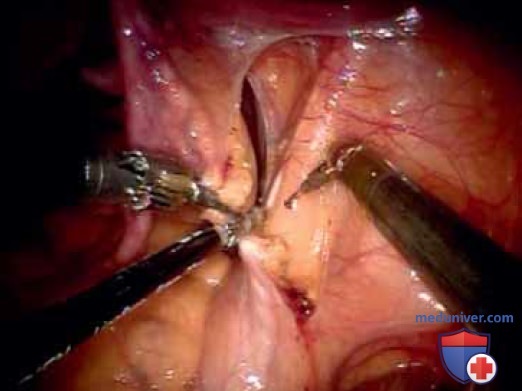
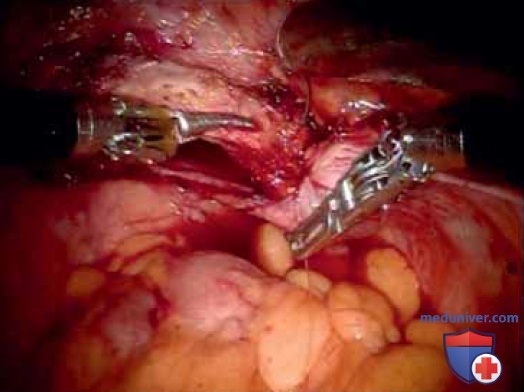
3. Выделение маточных сосудов. Маточные сосуды коагулируют и выделяют рядом с боковой стенкой шейки матки (рис. 22), но до разделения кардинальной связки.
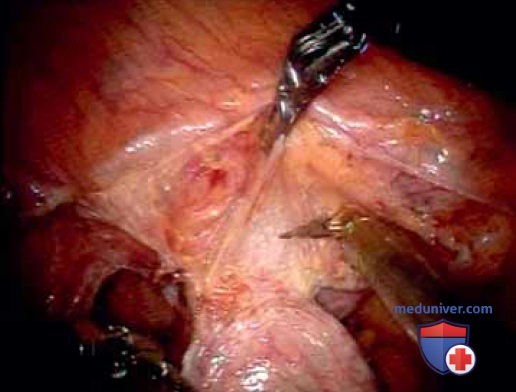
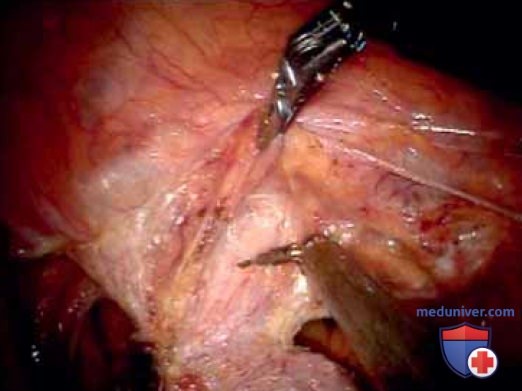
Те же этапы повторяют на противоположной стороне для коагуляции и пересечения правых маточных сосудов (рис. 23-28).
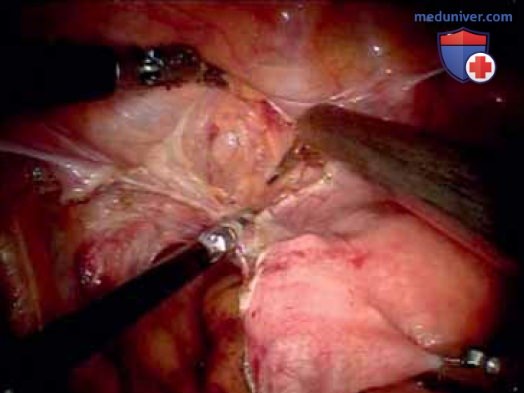
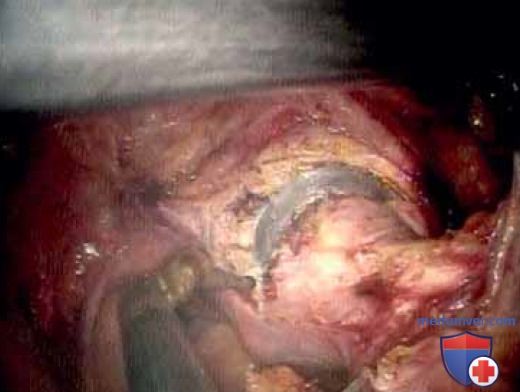
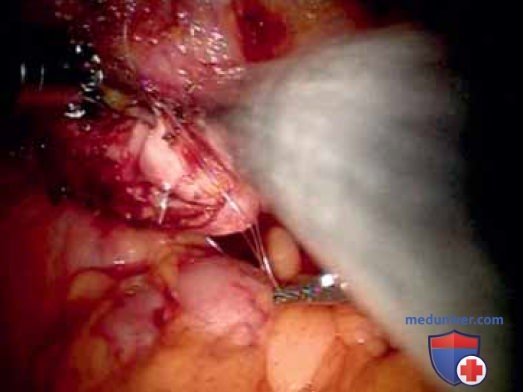
4. Мобилизация мочевого пузыря: диссекция пузырно-влагалищного пространства. Мочевой пузырь отделяют от передней стенки шейки матки и влагалища под контролем влагалищного зонда, шеечного колпачка или маточного манипулятора (рис. 29) на расстояние от 1 до 2 см от шеечно-влагалищного соединения.
Термокаутером отмечают место соединения влагалища и шейки матки, чтобы обозначить место пересечения кардинальных связок (рис. 30).
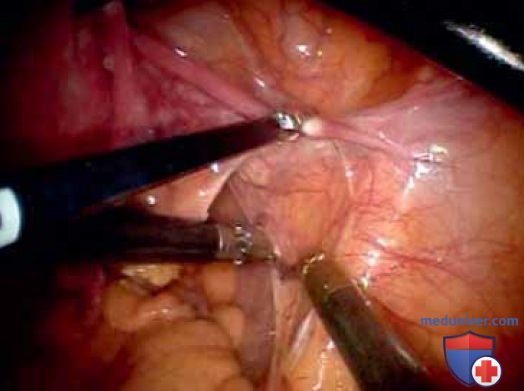
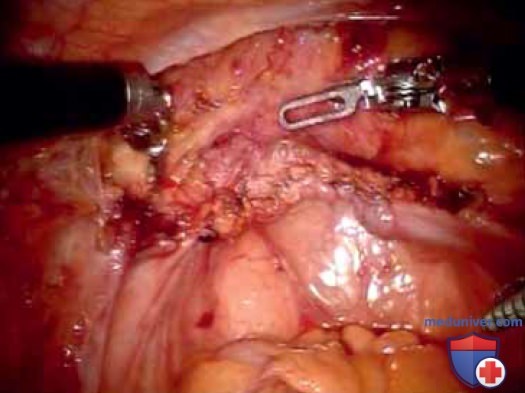
5. Разделение кардинальных связок. После мобилизации мочевого пузыря и идентификации хода мочеточника кардинальные связки коагулируют и разделяют вблизи шейки матки одним-двумя касаниями коагулирующего сосуды инструмента, начиная с левой стороны (рис. 31), а затем переходят на правую сторону (рис. 32).

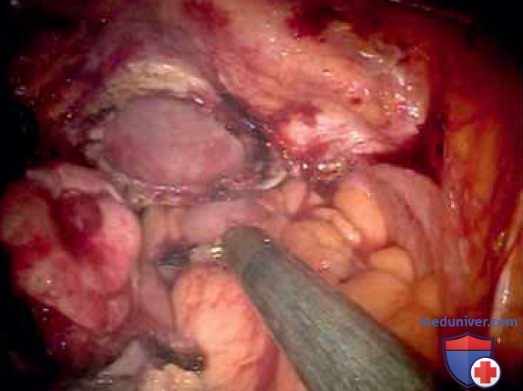
6. Кольпотомия. Переднюю кольпотомию выполняют, начиная с заранее отмеченного места на 12 часах соединения влагалища с шейкой матки (рис. 33), и продолжают в направлении правого и левого сводов влагалища (рис. 34).


Разрез продолжают до левого влагалищного свода, который рассекают (рис. 35).
Переднюю кольпотомию продолжают до правого влагалищного свода, который пересекают (рис. 36), а затем продолжают разрез по задней стенке влагалища до места пересечения левой стенки влагалища (рис. 37).

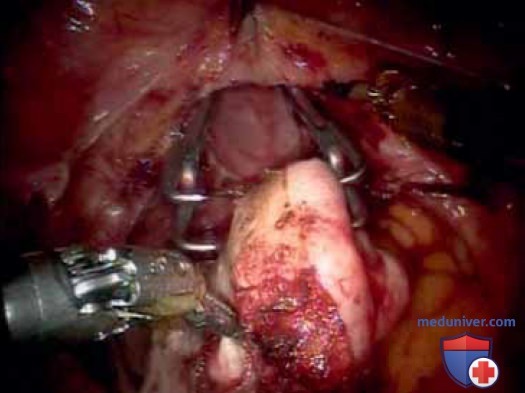
7. Удаление матки. Хирург удаляет матку через влагалище с помощью введенных во влагалище двузубых пулевых щипцов (рис. 38). Одновременно по срединной линии сводят большие половые губы для предотвращения утечки пневмоперитонеума.
8. Ушивание манжетки. Манжетку влагалища ушивают рассасывающимися швами 2-0, захватывая с обеих сторон крестцово-маточные связки (рис. 39).
Иглы вводят на расстоянии 5 мм от края влагалища с интервалом 5 мм (рис. 40).
Не существует стандартного метода наложения швов, который в наибольшей степени позволял бы избежать расхождения краев раны, и до сих пор на эту тему не были выполнены проспективные рандомизированные исследования. Обычно накладывают либо непрерывный обвивающий шов или прерывистые швы из рассасывающегося материала. Надежное сближение передней и задней фасций влагалища большими фрагментами (5 мм) помогают предупредить расхождение (рис. 41).
к) Заключение. Роботические операции, так же как лапароскопические, имеют то преимущество перед лапаротомией, что вызывают меньшую кровопотерю, сокращают срок пребывания в стационаре и ускоряют процесс выздоровления.
В большинстве своем исходы такие же, как и при проведении лапароскопических вмешательств. Тем не менее роботические операции предпочтительнее в перечисленных выше случаях. Робототехника облегчает проведение лапароскопического вмешательства, и поэтому хирурги охотно прибегают к роботическим операциям, если в их распоряжении есть соответствующее оборудование. Широкому распространению метода препятствует высокая стоимость системы, необходимость дополнительного приобретения инструментов (рассчитанных на 10 использований) и высокая стоимость технического обслуживания.
- Читать далее "Осложнения лапароскопических операций: тактика"
Редактор: Искандер Милевски. Дата публикации: 23.3.2023